
➔ Index of ⦁ -200 ⦁
Half bridge
The half bridge simplified circuit to be taken as reference is shown below. The push-pull version is analysed here: it is composed by two switches (a low side and a high side) and an input LC filter. The following formulas are valid for the active driving mode (the load is connected between the switching node and the ground node).

The half bridge equations are listed below. Please, refer to the following image to have a better understanding of current and voltage at various nodes and paths

Load analysis
The ideal voltage at the switching node is a square wave $$V_{load}(t) = V_{sup} \cdot squarewave(T,D)(t)$$
The average voltage and current in the load are shown below $$V_{load,avg} = \frac{V_{sup} T_{on}}{T} = V_{sup} D$$ $$I_{load,avg} = \frac{V_{load,avg}}{R_{load}}$$ $$V_{Lload}(t) = V_{sup} \cdot squarewave(T,D)(t) - V_{load,avg}$$ $$V_{Rload}(t) = V_{load}(t) - V_{Lload,avg}(t) = V_{load,avg}$$
Since we are working with an inductive load, the integral of the voltage over the time in the inductive component of the load must be zero. $$\int_{0}^{T} V_{Lload}(t) dt = 0$$
The voltage seen by the load inductor is the supply voltage minus the average voltage over the time. The current ripple is described by the common inductor law $$V_{Lload@Ton} = V_{sup}-V_{load,avg} \quad , \quad V_{Lload@Toff} = -V_{load,avg}$$ $$\Delta I_{load,pkpk} = \frac{V_{Lload@Ton}}{L} T_{on} = \frac{V_{sup}-V_{load,avg}}{L} D T = \frac{V_{sup}}{L f} (1-D) D$$
Since the pkpk inductor current depends on the duty, its maximum is reached when the duty cycle is set to 50%. In the following image the supply voltage was set to 12V and the load inductance to 1mH.

Input Capacitor analysis
Current analysis
Let's find the most appropriate input capacitor. Input capacitor is part of an LC undamped filter which decouples the average current to be provided by the supply and the AC current required by the load: all the following formulas are valid under the assumption that the input filter inductor provides only the DC component of the overall bridge current and the filter capacitor only the AC component; in the real world, a small AC current comes from the supply too but in this case such contribution is neglected. All the following calculations are done under the assumption that (signs are coherent with the reference image): $$I_{brg}(t)=I_{sup}(t)+I_{cap}(t)$$ All the following calculations are unrelated to the capacitor size but they are dependent on the system only!
The equations for the bridge currents are the following ones (Ibrg is different from zero only during turn-on phase): $$I_{brg,@Toff} = 0$$ $$I_{brg,low@Ton} = I_{load,avg} - \frac{\Delta I_{load,pkpk}}{2}$$ $$I_{brg,high@Ton} = I_{load,avg} + \frac{\Delta I_{load,pkpk}}{2}$$ $$I_{sup} = I_{brg,avg} = \frac{(I_{brg,low@Ton} + I_{brg,high@Ton}) T_{on}}{2 T} = I_{load,avg} D$$
It is now possible to calculate the current in the input capacitor. During the turn on phase (high side switch on, low side off), the load current is provided by the input capacitor and the supply. $$I_{cap,low@Ton} = I_{brg,low@Ton} - I_{sup}$$ $$I_{cap,high@Ton} = I_{brg,high@Ton} - I_{sup}$$ $$Q_{cap@Ton} = \frac{(I_{cap,low@Ton} + I_{cap,high@Ton}) T_{on}}{2} = \frac{I_{load,avg} D (1-D)}{f}$$
During the turn off phase (high side switch off, low side on), the load current recirculates in the low side switch (channel or body diode, depending on the current value) and the capacitor is charged at a constant current. $$I_{cap@Toff} = -I_{brg,avg} = -I_{sup}$$ $$Q_{cap@Toff} = I_{cap@Toff} T_{off} = \frac{-I_{brg,avg} (1-D)}{f}=\frac{-I_{load,avg} D (1-D)}{f}$$
As you can see the charge balance in the capacitor is ensured. $$Q_{cap@Toff} = -Q_{cap@Ton}$$
The overall RMS current in the capacitor can be calculated with the well known formula: $$I_{cap,RMS} = \sqrt{\frac{1}{T} \int_{0}^{T} I_{cap}^2(t) dt} = \sqrt{\frac{1}{T} \Bigl(\int_{0}^{T_{on}} I_{cap@Ton}^2(t) dt + \int_{Ton}^{T} I_{cap@Toff}^2(t) dt\Bigr)}$$ Now we can divide the RMS current calculation in two parts: one related to Ton (RMS of a trapezoid wave) and the second one to Toff (RMS of a square wave). $$I_{cap,RMS@Ton} = \sqrt{\frac{D}{3} \Bigl(I_{cap,low@Ton}^2 + I_{cap,high@Ton}^2 + I_{cap,low@Ton} I_{cap,high@Ton}\Bigr)}$$ $$I_{cap,RMS@Toff} = \sqrt{(1-D) \Bigl(I_{cap@Toff}^2\Bigr)}$$ $$I_{cap,RMS} = \sqrt{I_{cap,RMS@Ton}^2 + I_{cap,RMS@Toff}^2}$$ So, after all these calculations, the chosen capacitor must be able to provide the required RMS current (possibly with some margin). Remeber that all bulk capacitor are usually electrolytic ones and they all have a derating factor to be applied to the maximum RMS current when switching frequency is lower than - typically - 100kHz.
Voltage analysis
Once the maximum input capacitor ripple current has been found, the capacitor size must be calculated; the following formula is enough. $$\Delta V_{cap,pkpk}=\frac{\Delta Q_{cap@Ton}}{C}=\frac{I_{load,avg} D (1-D)}{f C}$$ Note that, again, the maximum ripple voltage on the input capacitor is obtained when D=50%.
Power losses
Input inductor power loss
Input inductor filter power loss depends on the series resistance of the inductor itself and the average current drained from the power source. $$P_{loss,L}=I_{brg,avg}^2DCR_{ind}$$
Input capacitor power loss
Input capacitor power loss is due to the ESR of the capacitor itself which is ideally the only parasitic contribution. Noth that the ESR of a capacitor changes with the frequency so the right value has to be used in this formula. $$P_{loss,cap}=I_{cap,RMS}^2ESR_{cap@f}$$
MOSFETs power loss
Half bridge MOSFETs dissipate some power because of three aspects: DC power loss (due to the resistive behaviour of the channel when the MOSFET is driven ON), switching loss (due to the fact that the load has an inductive component), gate charge loss (completely dissipated, in the worst case, by the internal gate resistance). The following formulas are valid for the case of active driving mode. $$P_{lossDC,MOS-HS}=D*R_{DS,ON@Tj,Iload}*I_{load,avg}^2$$ $$P_{lossDC,MOS-LS}=(1-D)*R_{DS,ON@Tj,Iload}*I_{load,avg}^2$$ $$P_{lossSW,MOS}=\frac{(t_{r,MOS}+t_{f,MOS})}{T}*I_{load,avg}*V_{sup}$$ $$P_{lossGC,MOS}=Q_{gtot,MOS}*V_{g,ON}*f$$
Model
In order to control the current, a model of the whole feedback system has to be found. To find the duty cycle to be applied to the load, a modulation scheme based on constant-triangle wave comparison is used. In the following image you can find the principle scheme of the control loop.

The scheme blocks are described in the list below
- Gc(s): s-function converting the current setpoint to a voltage setpoint, assuming an ideal control loop.
- P(s), I(s): s-functions of the PI regulator
- Ga1(s), Ga2(s): actuator s-functions. Ga1(s) is a voltage-to-duty translator, Ga2(s) is the real actuator that receives the command and provides the current to the load (half-bridge power devices)
- Gp(s): plant small signal model
- Gs, Gs(s): constant multiplier and s-function describing the feedback network (sensor) in the control loop.
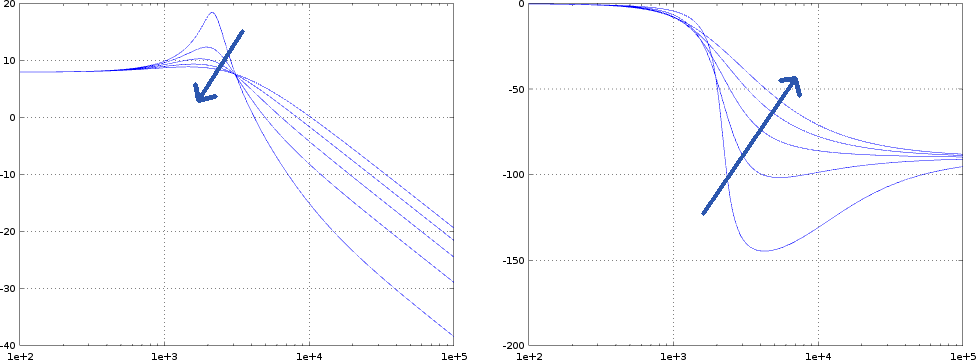
Now, to analyze the closed loop system response, we have to find Α and β of the system. Α is the product of the direct chain from setpoint to actuation and β is the product of the feedback network so, knowing the various block s-functions $$G_{c}(s) = \frac{1}{G_{s} R_{sense}} \quad [\frac{1}{Ohm}]$$ $$G_{PI}(s) = K_{P} + \frac{K_{I}}{s}\quad [adim.]$$ $$G_{a1}(s) = \frac{1}{V_{tri}}\quad [\frac{1}{V}]$$ $$G_{a2}(s) = V_{sup}e^{-sT_{delay}} \quad [V]$$ $$G_{p}(s) = \frac{1}{sL_{L}+R_{L}} \quad [\frac{1}{Ohm}]$$ $$G_{s}(s) = R_{sense} G_{s} \frac{1}{1+sR_{f}C_{f}} \quad [Ohm]$$ then the overall closed-loop s-function can be found $$A = G_{PI}(s)\;G_{a1}(s)\;G_{a2}(s)\;G_{p}(s)$$ $$\beta = G_{s}(s)$$ $$H(s) = \frac{A}{1+A\;\beta} = \frac{G_{PI}(s)\;G_{a1}(s)\;G_{a2}(s)\;G_{p}(s)}{1+G_{PI}(s)\;G_{a1}(s)\;G_{a2}(s)\;G_{p}(s)\;G_{s}(s)}$$ $$H(s) = \frac{V_{sup}e^{-sT_{delay}}(sK_{P}+K_{I})}{s^2V_{tri}L_{L}+s(V_{tri}R_{L}+K_{P}V_{sup}e^{-sT_{delay}}R_{sense}G_{s}\frac{1}{1+sR_{f}C_{f}})+K_{I}V_{sup}e^{-sT_{delay}}R_{sense}G_{s}\frac{1}{1+sR_{f}C_{f}}}$$ Now, we can remove the actuator delay and the feedback RC filter effects to get a simpler 2nd order system, so that natural resonance frequency and natural damping can be identified. $$H(s) = \frac{\omega_{n}^2}{s^2+2\xi\omega_{n}s+\omega_{n}^2}$$ $$H(s) = \frac{\frac{V_{sup}(sK_{P}+K_{I})}{V_{tri}L_{L}}}{s^2+s\frac{(V_{tri}R_{L}+K_{P}V_{sup}R_{sense}G_{s})}{V_{tri}L_{L}}+\frac{K_{I}V_{sup}R_{sense}G_{s}}{V_{tri}L_{L}}}$$ $$r = \frac{V_{sup}R_{sense}G_{s}}{V_{tri}L_{L}} \quad\to\quad \omega_{n} = \sqrt{\frac{K_{I}V_{sup}R_{sense}G_{s}}{V_{tri}L_{L}}} = \sqrt{K_{I}r}$$ $$1+K_{P}r = 2\xi\omega_{n} \quad\to\quad \xi = \frac{1+K_{P}r}{2\sqrt{K_{I}r}}$$ Note that this is not a real 2nd order system since there is a zero introduced by the PI controller: changing P and I contribution it is possible to change the system step response but the common overshoot, rise time and settling time formulas are not valid anymore - they provide very approximate values for these quantities. In the image below it is possible to see the difference between a pure second order system step response and a second order system with an additional zero given by the PI controller; in the first case, increasing the Kp the system slows down (the first order coefficient of the denominator increases) while in the second case, increasing Kp, the dampening effect increases and at the same time the LHP zero moves toward lower frequency, compensating the effect of the two complex conjugated poles.

Share this page






Comments
Be polite and respectful in the comments section. In case of doubts, read this before posting.